**Shape Reconstruction with Differentiable Projections and Deep Priors**
[Matheus Gadelha](http://mgadelha.me), [Rui Wang](https://people.cs.umass.edu/~ruiwang/) and [Subhransu Maji](http://people.cs.umass.edu/~smaji/)
_University of Massachusetts - Amherst_

We investigate the problem of reconstructing shapes from noisy and
incomplete projections in the presence of viewpoint uncertainties.
The problem is cast as an optimization over the shape given measurements obtained by a projection
operator and a prior.
We present differentiable projection operators for a number of
reconstruction problems which when combined with the deep image
prior or shape prior allows efficient inference through
gradient descent.
We apply our method on a variety of reconstruction problems, such as
tomographic reconstruction from a few samples, visual hull
reconstruction incorporating view uncertainties, and 3D shape
reconstruction from noisy depth maps.
Experimental results show that our approach is effective for such
shape reconstruction problems, without requiring any task-specific
training.
[**Paper**](dsp-paper.pdf) | [**Code**](https://github.com/matheusgadelha/ShapeRecDeepPrior)
Tomographic Reconstruction
==========================================================================================

**Tomographic reconstruction results from sinograms** (radon transforms) sampled with n = 30 angles and noise (σ = 1).
The sinogram is rescaled to the image size with nearest neighbor interpolation for visibility. From left to right in each row is the noise free
image, the noisy sinogram, reconstruction with the filtered backprojection (FBP), TV prior, BM3D, and deep image prior. The SSIM and
PSNR are shown for each approach on top of the corresponding figure.
Shape-from-Silhouette 3D Reconstruction
==========================================================================================
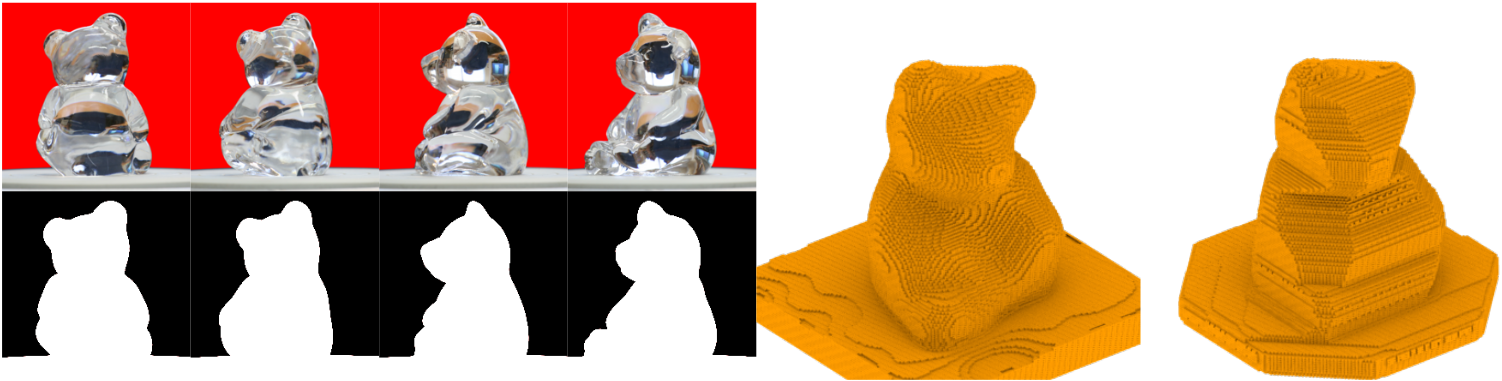
**Shape-from-silhouette reconstruction using captured images**. For this glass object, we photographed 4 views, with 45 degree
angle apart, against a uniform background color. We then applied background-color removal and converted each image to binary silhouette
image. The first reconstructed model is the result using our deep prior, whereas the second is the result using the space carving baseline.

**Shape-from-silhouette reconstruction with perturbed viewpoints**. Results for the space carving baseline in the first row, our
method in the second row, ground-truth shapes in the third row. Our results are computed minimizing Equation 11 through 500 gradient
descent steps. Our method is capable of updating the initial viewpoint parameters and is capable to recover from imprecise viewpoint
assignment. The space carving baseline is not robust to viewpoint perturbations which means it ends up carving the wrong regions of the
volume, leading to poor reconstructions and eliminating thin object structures.
Shape-from-Depth 3D Reconstruction
==========================================================================================

**Effect of the amount of noise and number of views in the reconstruction**.
On top, 3D shape reconstructed from very noisy (σ = 0.1) depth images of the same object.
On the bottom, the same 3D shape reconstructed with 4 depth images and varying levels of noise.
Citation
==========================================================================================
```
@inProceedings{srdeepprior19,
title={Shape Reconstruction using Differentiable Projections and Deep Priors},
author = {Matheus Gadelha and Rui Wang and Subhransu Maji},
booktitle={ICCV},
year={2019}
}
```