**Label-Efficient Learning on Point Clouds using Approximate Convex Decompositions**
[Matheus Gadelha*](http://mgadelha.me), [Aruni RoyChowdhury*](https://arunirc.github.io/), [Gopal Sharma](https://hippogriff.github.io/), [Evangelos Kalogerakis](https://people.cs.umass.edu/~kalo/),
[Liangliang Cao](http://llcao.net/), [Erik Learned-Miller](https://people.cs.umass.edu/~elm/), [Rui Wang](https://people.cs.umass.edu/~ruiwang/), [Subhransu Maji](http://people.cs.umass.edu/~smaji/)
_University of Massachusetts - Amherst_

The problems of shape classification and part segmentation
from 3D point clouds have garnered increasing attention in the last few
years. Both of these problems, however, suffer from relatively small training sets,
creating the need for statistically efficient methods to learn
3D shape representations. In this paper, we investigate the use of Approximate
Convex Decompositions (ACD) as a self-supervisory signal
for label-efficient learning of point cloud representations. We show that
using ACD to approximate ground truth segmentation provides excellent self-supervision
for learning 3D point cloud representations that are
highly effective on downstream tasks. We report improvements over the
state-of-the-art for unsupervised representation learning on the ModelNet40
shape classification dataset and significant gains in few-shot part
segmentation on the ShapeNetPart dataset.
[**ArXiv paper**](https://arxiv.org/pdf/2003.13834.pdf) | [**Code**](https://github.com/matheusgadelha/PointCloudLearningACD) | [**ACD Dataset**](http://maxwell.cs.umass.edu/zezhou/visualization/acd/ACDShapeNetSegPartAnno.zip)
Overview
==========================================================================================
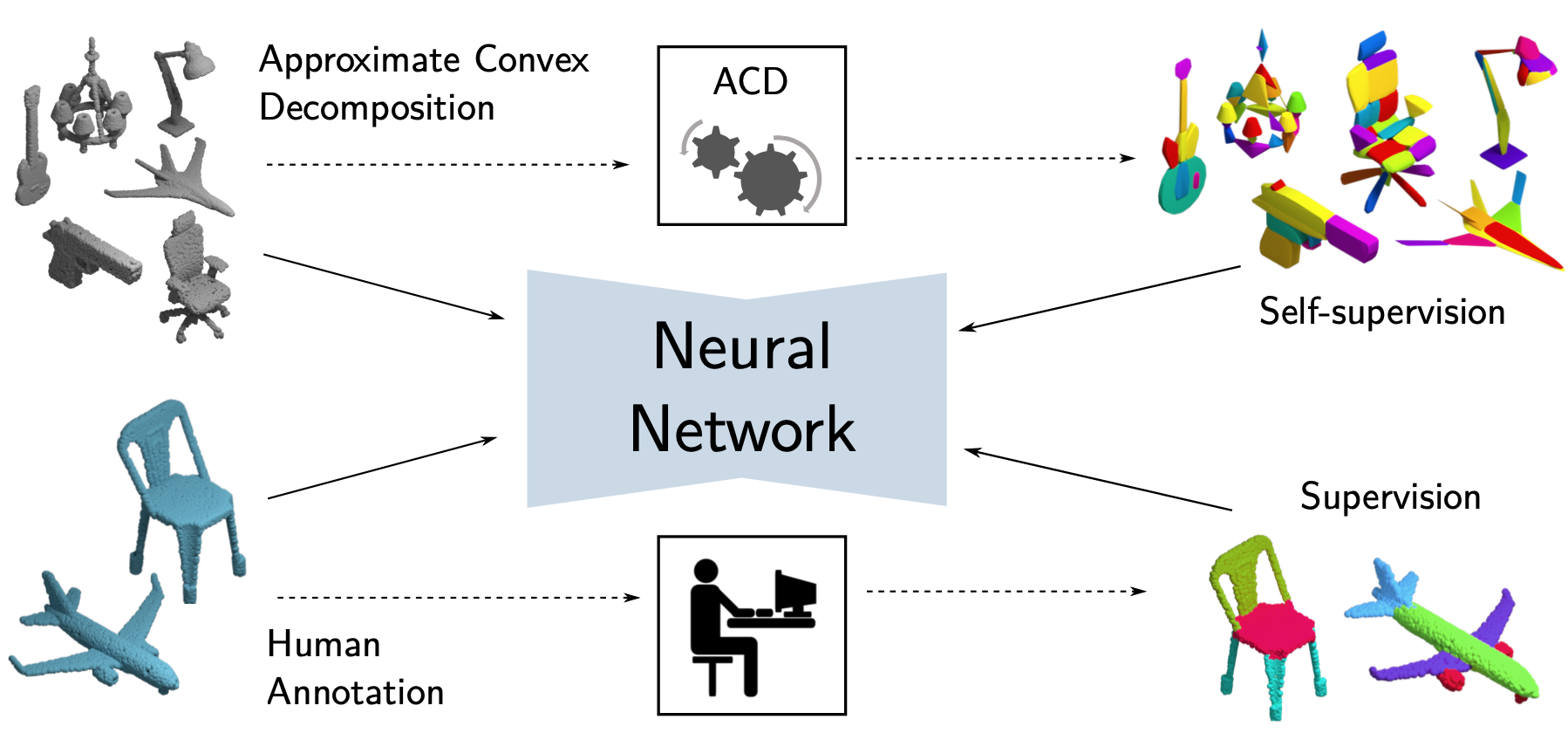
**Top**: Approximate Convex Decomposition (ACD) can be applied on a large repository of unlabeled point clouds,
yielding a self-supervised training signal for the neural network without involving any human annotators.
**Bottom**: the usual fully-supervised setting, where human annotators label the semantic parts of shapes,
which are then used as supervision for the neural network. The unsupervised ACD task results in learning
useful representations from unlabeled data, significantly improving performance in shape classification
and semantic segmentation, especially when labeled data is scarce or unavailable.
Approximate Convex Decomposition
==========================================================================================
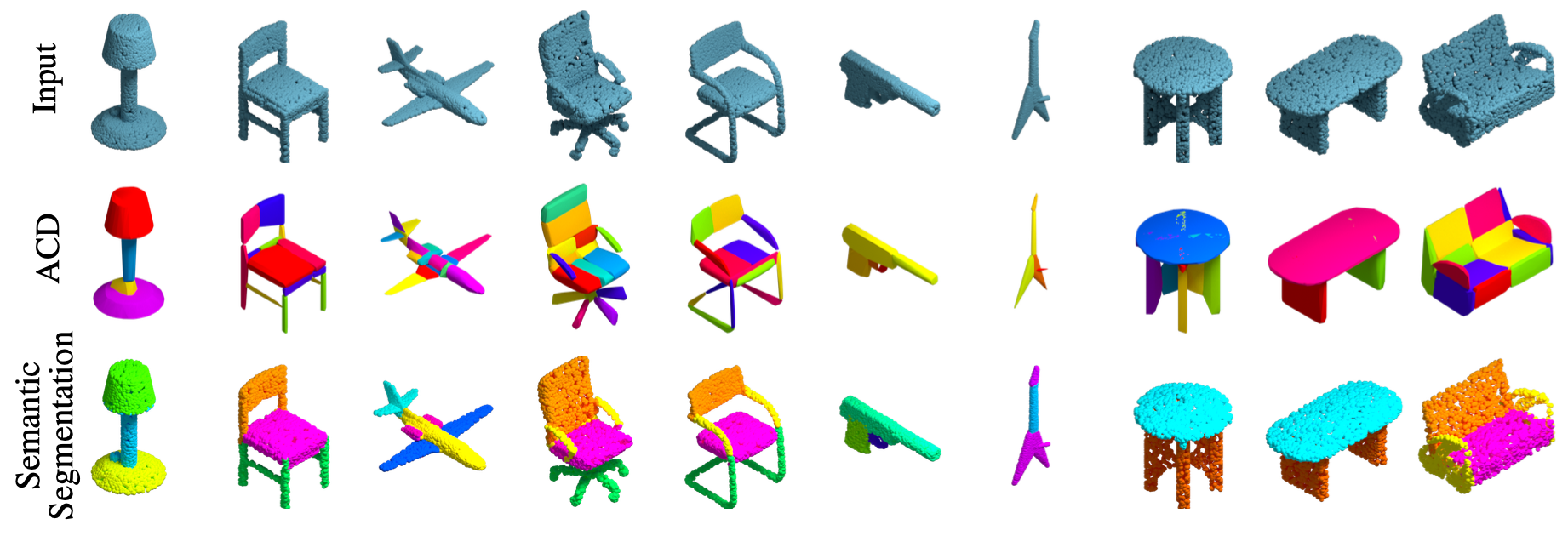
Input point clouds (first row), convex components automatically computed by ACD (second row) and
human-labeled point clouds (last row) from the ShapeNet part segmentation benchmark.
Note -- (i) different colors for the ACD components only signify different parts -- no semantic meaning
or inter-shape correspondence is inferred by this procedure;
(ii) for the human labels, colors do convey
semantic meaning: e.g., the backs of chairs are always orange;
(iii) while the ACD decompositions tend to oversegment the shapes, they contain most of the boundaries
present in the human annotations, suggesting that the model has similar criteria for decomposing objects into subparts;
e.g., the chair’s legs are separated from the seat, wings and engines are separated from the airplane boundary,
pistol trigger is separated from the rest.
Few-Shot Part Segmentation
==========================================================================================

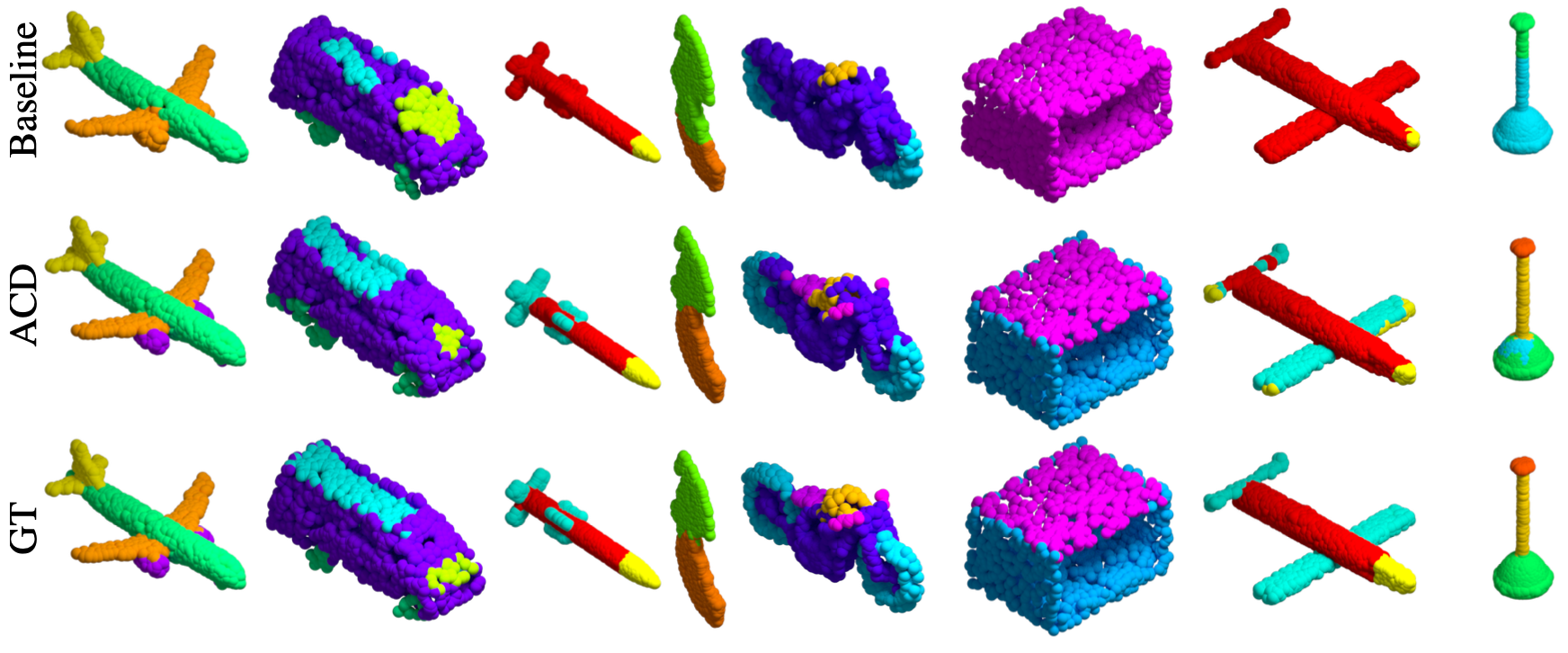
Qualitative comparison on 5-shot ShapeNet part segmentation.
The baseline method in the first row corresponds to training using only 5 examples per class,
whereas the ACD results in the second row were computed by performing joint training (cross-entropy from
5 examples + contrastive loss over ACD components from ShapeNetCore).
The network backbone architecture is the same for both approaches – PointNet++.
The baseline method merges parts that should be separated, e.g., engines of the airplane,
details of the rocket, top of the table, and seat of the motorcycle.
Unsupervised Shape Classification
==========================================================================================

Unsupervised shape classification on the ModelNet40 dataset.
The representations learned in the intermediate layers by a network trained for the ACD task
on ShapeNet data are general enough to be useful for discriminating between shape categories
on ModelNet40.
Citation
==========================================================================================
```
@inProceedings{selfsupacd,
title={Label-Efficient Learning on Point Clouds using Approximate Convex Decompositions},
author = {Matheus Gadelha and Aruni RoyChowdhury and Gopal Sharma and Evangelos Kalogerakis and Liangliang Cao and Erik Learned-Miller and Rui Wang and Subhransu Maji},
booktitle={European Conference on Computer Vision (ECCV)},
year={2020}
}
```